- жү“еҚЎзӯүзә§пјҡеҲқжқҘд№ҚеҲ°
- жү“еҚЎжҖ»еӨ©ж•°пјҡ6
- жңҖиҝ‘жү“еҚЎпјҡ2025-05-18 06:45:42
 е·Із»‘е®ҡжүӢжңә е·Із»‘е®ҡжүӢжңәжіЁеҶҢдјҡе‘ҳ
- з§ҜеҲҶ
- 171
|
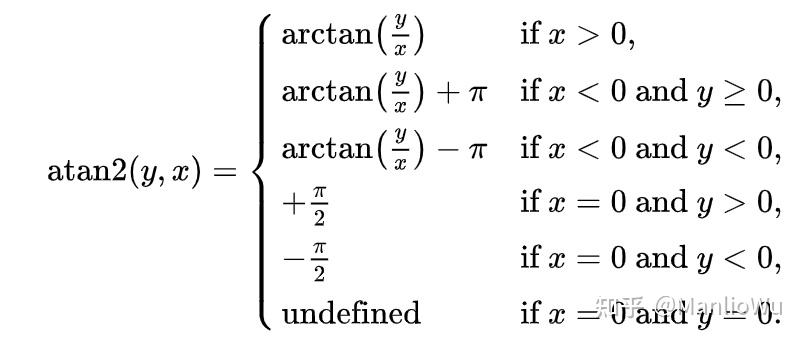
з”ұдәҺе…ЁеӣҪеӨ§еӯҰз”ҹжҷәиғҪжұҪиҪҰз«һиөӣдёӯи¶ҠйҮҺз»„йңҖиҰҒдҪҝз”ЁGNSSжЁЎеқ—иҝӣиЎҢе®ҡдҪҚе’Ңи§Јз®—пјҢдҪҶеҚ•зІҫеәҰжө®зӮ№иҝҗз®—дјҡеҜјиҮҙзІҫеәҰдёўеӨұпјҢжүҖд»Ҙи§ЈеҶіж–№жЎҲдёәеӢҫйҖүвҖңdouble precision floating pointвҖқејҖеҗҜеҸҢзІҫеәҰжө®зӮ№иҝҗз®—пјҢд»ҘйҒҝе…ҚзІҫеәҰдёўеӨұй—®йўҳгҖӮдҪҶдёҺд№ӢеёҰжқҘзҡ„жҳҜatan2еҮҪж•°и®Ўз®—ејӮеёёзҡ„жғ…еҶөпјҢз”ұдәҺжғҜжҖ§еҜјиҲӘеңЁжҷәиғҪжұҪиҪҰдёҠзҡ„жҷ®еҸҠпјҢIMUжЁЎеқ—зҡ„е§ҝжҖҒи§Јз®—е°ӨдёәйҮҚиҰҒпјҢе…¶дёӯеӣӣе…ғ数解算欧жӢүи§’ж—¶еҸҜиғҪдјҡж¶үеҸҠеҲ°atan2еҮҪж•°пјҢжүҖд»Ҙеҝ…йЎ»з”ЁatanеҮҪж•°жқҘиЎЁзӨәеҮәatan2еҮҪж•°пјҢиҖҢдёҚиғҪзӣҙжҺҘи°ғз”Ёж ҮеҮҶж•°еӯҰеә“дёӯзҡ„atan2еҮҪж•°гҖӮж•…еҲҶдә«и§ЈеҶіеҺҹзҗҶдёҺзӨәдҫӢд»Јз ҒеҰӮдёӢпјҢе°Ҷmy_atan2еҮҪж•°е®ҡд№ү并声жҳҺпјҢеңЁйңҖиҰҒдҪҝз”Ёatan2зҡ„ең°ж–№жӣҝжҚўдёәmy_atan2еҚіеҸҜгҖӮ
#define M_PI 3.1415926535
double my_atan2(double y, double x) {
// еӨ„зҗҶx = 0зҡ„жғ…еҶө
if (x == 0) {
if (y > 0) {
return M_PI / 2; // yиҪҙжӯЈеҚҠиҪҙ
} else if (y < 0) {
return -M_PI / 2; // yиҪҙиҙҹеҚҠиҪҙ
} else {
return 0; // еҺҹзӮ№
}
}
else{
// и®Ўз®—еҹәзЎҖи§’еәҰ
double theta = atan(y / x);
// еӨ„зҗҶx вү 0зҡ„жғ…еҶө
if (x > 0) {
return theta; // 第дёҖиұЎйҷҗе’Ң第еӣӣиұЎйҷҗ
// еӨ„зҗҶx < 0зҡ„жғ…еҶө
} else {
if (y >= 0) {
return theta + M_PI; // 第дәҢиұЎйҷҗжҲ–xиҪҙиҙҹеҚҠиҪҙ
} else {
return theta - M_PI; // 第дёүиұЎйҷҗ
}
}
}
}
д»…дҫӣеҸӮиҖғпјҢзү№еҲ«йёЈи°ўпјҡйҷҲе·ҘгҖҒе·Ұе·ҘгҖҒзҺӢжҳұйЎәгҖҒyanгҖҒеӨ§wпјҒ
|
|
 |жүӢжңәзүҲ|ж·ұеңіеӣҪиҠҜдәәе·ҘжҷәиғҪжңүйҷҗе…¬еҸё
( зІӨICPеӨҮ2022108929еҸ·-2 )
|жүӢжңәзүҲ|ж·ұеңіеӣҪиҠҜдәәе·ҘжҷәиғҪжңүйҷҗе…¬еҸё
( зІӨICPеӨҮ2022108929еҸ·-2 )
 еҸ‘иЎЁдәҺ 2025-1-11 20:18:28
еҸ‘иЎЁдәҺ 2025-1-11 20:18:28