本帖最后由 wszjw2 于 2024-8-19 16:13 编辑
- 检测到按键后就一直发射对应的键码,不会停止。在main中发射程序后置cod为0也没用。
- #include "irsend.h"
-
- /**************声明函数*****************/
- void PCA_config(void);
- void IR_TxPulse(u16 pulse);
- void IR_TxSpace(u16 pulse);
- void IR_TxByte(u8 dat);
- void txcode(void);
-
-
- void main(void)
- {
- ioset();
- PCA_config();
- P_IR_TX = IR_TX_OFF;
- EA=1; //打开总中断
-
- while(1)
- {
- delay_ms(30);
- txcode();
- cod=0;
- }
- }
- u8 getcode(void)
- {
- u8 keycode;
-
- if(key_mov==0)
- {
-
- delay_us(10);
- if(key_mov==0)keycode=0x45;
- }
- else if(key_add==0)
- {
-
- delay_us(10);
- if(key_add==0)keycode=0x40;
- }
- else if(key_minus==0)
- {
-
- delay_us(10);
- if(key_minus==0)keycode=0x43;
- }
- return keycode;
- }
-
- void txcode(void)
- {
- cod=getcode();
- if(cod != 0) //检测到键码
- {
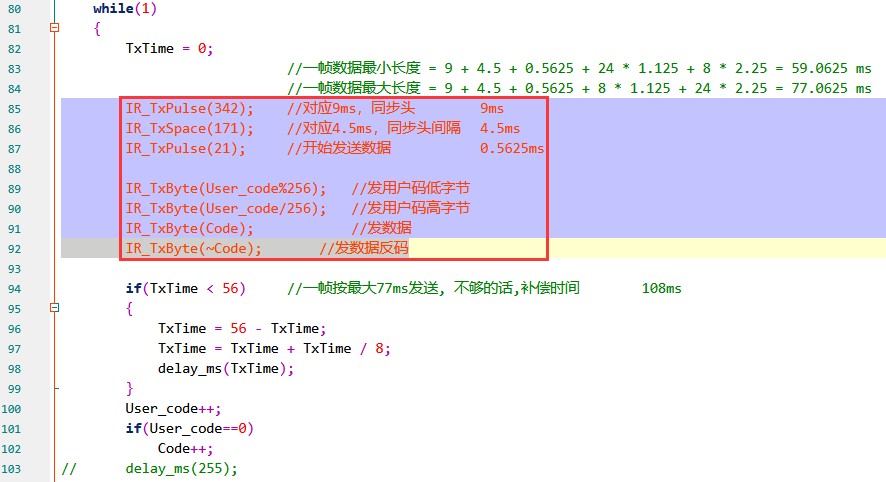
- TxTime = 0;
- //一帧数据最小长度 = 9 + 4.5 + 0.5625 + 24 * 1.125 + 8 * 2.25 = 59.0625 ms
- //一帧数据最大长度 = 9 + 4.5 + 0.5625 + 8 * 1.125 + 24 * 2.25 = 77.0625 ms
- IR_TxPulse(342); //对应9ms,同步头 9ms
- IR_TxSpace(171); //对应4.5ms,同步头间隔 4.5ms
- IR_TxPulse(21); //开始发送数据 0.5625ms
-
- IR_TxByte(User_code%256); //发用户码低字节
- IR_TxByte(User_code/256); //发用户码高字节
- IR_TxByte(cod); //发数据
- IR_TxByte(~cod); //发数据反码
-
- if(TxTime < 56) //一帧按最大77ms发送, 不够的话,补偿时间 108ms
- {
- TxTime = 56 - TxTime;
- TxTime = TxTime + TxTime / 8;
- delay_ms(TxTime);
- }
- delay_ms(31);
-
- /*while(IO_KeyState != 0) //键未释放发送连发码
- {
- IR_TxPulse(342); //对应9ms, 同步头 9ms
- IR_TxSpace(86); //对应2.25ms,同步头间隔 2.25ms
- IR_TxPulse(21); //开始发送数据 0.5625ms
- delay_ms(96);
- }*/
- }
- }
- /************* 发送脉冲函数 **************/
- void IR_TxPulse(u16 pulse)
- {
- tx_cnt = pulse;
- B_Space = 0; //发脉冲
- CCAPM2 = 0x48 | 0x04 | 0x01; //工作模式 0x00: PCA_Mode_Capture, 0x42: PCA_Mode_PWM, 0x48: PCA_Mode_SoftTimer
- CR = 1; //启动
- while(CR);
- P_IR_TX = IR_TX_OFF;
- }
- /************* 发送空闲函数 **************/
- void IR_TxSpace(u16 pulse)
- {
- tx_cnt = pulse;
- B_Space = 1; //空闲
- CCAPM2 = 0x48 | 0x01; //工作模式 0x00: PCA_Mode_Capture, 0x42: PCA_Mode_PWM, 0x48: PCA_Mode_SoftTimer
- CR = 1; //启动
- while(CR);
- P_IR_TX = IR_TX_OFF;
- }
- /************* 发送一个字节函数 **************/
- void IR_TxByte(u8 dat)
- {
- u8 i;
- for(i=0; i<8; i++)
- {
- if(dat & 1) IR_TxSpace(63), TxTime += 2; //数据1对应 1.6875 + 0.5625 ms
- else IR_TxSpace(21), TxTime++; //数据0对应 0.5625 + 0.5625 ms
- IR_TxPulse(21); //脉冲都是0.5625ms
- dat >>= 1; //下一个位
- }
- }
-
- //========================================================================
- // 函数: void PCA_config(void)
- // 描述: PCA配置函数.
- // 参数: None
- // 返回: none.
- // 版本: V1.0, 2012-11-22
- //========================================================================
- void PCA_config(void)
- {
- // PCA0初始化
- CCON = 0x00; //清除所有中断标志
- CCAPM0 = 0x48 | 0x01; //工作模式 + 中断允许 0x00: PCA_Mode_Capture, 0x42: PCA_Mode_PWM, 0x48: PCA_Mode_SoftTimer
- PCA_Timer0 = 100; //随便给一个小的初值
- CCAP0L = (u8)PCA_Timer0; //将影射寄存器写入捕获寄存器,先写CCAP0L
- CCAP0H = (u8)(PCA_Timer0 >> 8); //后写CCAP0H
-
- PPCA = 1; //高优先级中断
- CMOD = (CMOD & ~0xe0) | 0x08; //选择时钟源, 0x00: 12T, 0x02: 2T, 0x04: Timer0溢出, 0x06: ECI, 0x08: 1T, 0x0A: 4T, 0x0C: 6T, 0x0E: 8T
- CH = 0;
- CL = 0;
- CR = 0;
- tx_cnt = 2;
- }
-
- //========================================================================
- // 函数: void PCA_Handler (void) interrupt PCA_VECTOR
- // 描述: PCA中断处理程序.
- // 参数: None
- // 返回: none.
- // 版本: V1.0, 2012-11-22
- //========================================================================
-
- #define D_38K_DUTY ((MAIN_Fosc * 26) / 1000000UL + MAIN_Fosc / 3000000UL) /* 38KHZ周期时间 26.3us */
- #define D_38K_OFF ((MAIN_Fosc * 17) / 1000000UL + MAIN_Fosc / 3000000UL) /* 发射管关闭时间 17.3us */
- #define D_38K_ON ((MAIN_Fosc * 9) / 1000000UL) /* 发射管导通时间 9us */
-
- void PCA_Handler (void) interrupt 7
- {
- CCON = 0x40; //清除所有中断标志,但不关CR
- if(!B_Space) //发送载波
- { //发送脉冲,交替装载TH0值,溢出时自动重装
- P_IR_TX = ~P_IR_TX;
- if(P_IR_TX)
- {
- PCA_Timer0 += D_38K_OFF; //装载高电平时间 17.3us
- if(--tx_cnt == 0) CR = 0; //pulse has sent, stop
- }
- else PCA_Timer0 += D_38K_ON; //装载低电平时间 9us
- }
- else //发送暂停时间
- {
- PCA_Timer0 += D_38K_DUTY; //装载周期时间 26.3us
- if(--tx_cnt == 0) CR = 0; //空闲时间
- }
- CCAP0L = (u8)PCA_Timer0; //将影射寄存器写入捕获寄存器,先写CCAP0L
- CCAP0H = (u8)(PCA_Timer0 >> 8); //后写CCAP0H
- }
|  |手机版|深圳国芯人工智能有限公司
( 粤ICP备2022108929号-2 )
|手机版|深圳国芯人工智能有限公司
( 粤ICP备2022108929号-2 )
 发表于 2024-8-17 15:00:27
发表于 2024-8-17 15:00:27
 已绑定手机
已绑定手机 发表于 2024-8-17 15:28:53
发表于 2024-8-17 15:28:53