本帖最后由 一轮明月 于 2023-11-18 09:42 编辑
鲁东大学软件部分:
在电赛与智能车使用STC单片机的过程中感受很多。STC单片机具有较低的价格,且完全满足比赛要求,同时还具有较高的稳定性和可靠性。具有丰富的外设,包括通用输入/输出引脚(GPIO)、串口通信(UART)、定时器/计数器、比较器、PWM输出、ADC/DAC等,且有很多开源,可以满足多种应用需求,很是方便。
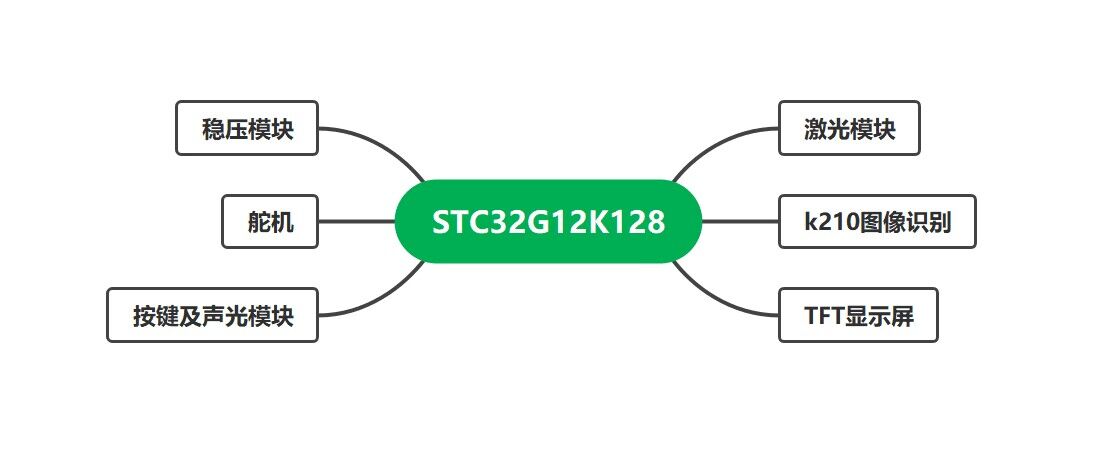
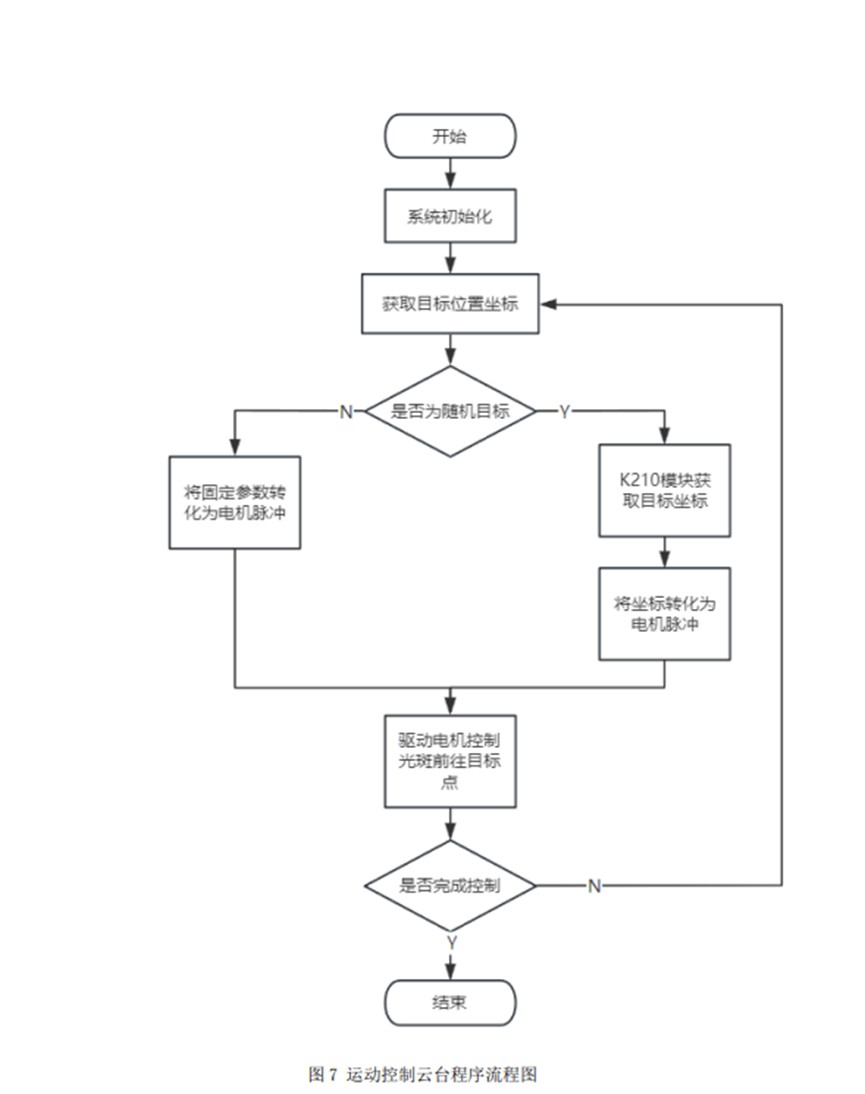
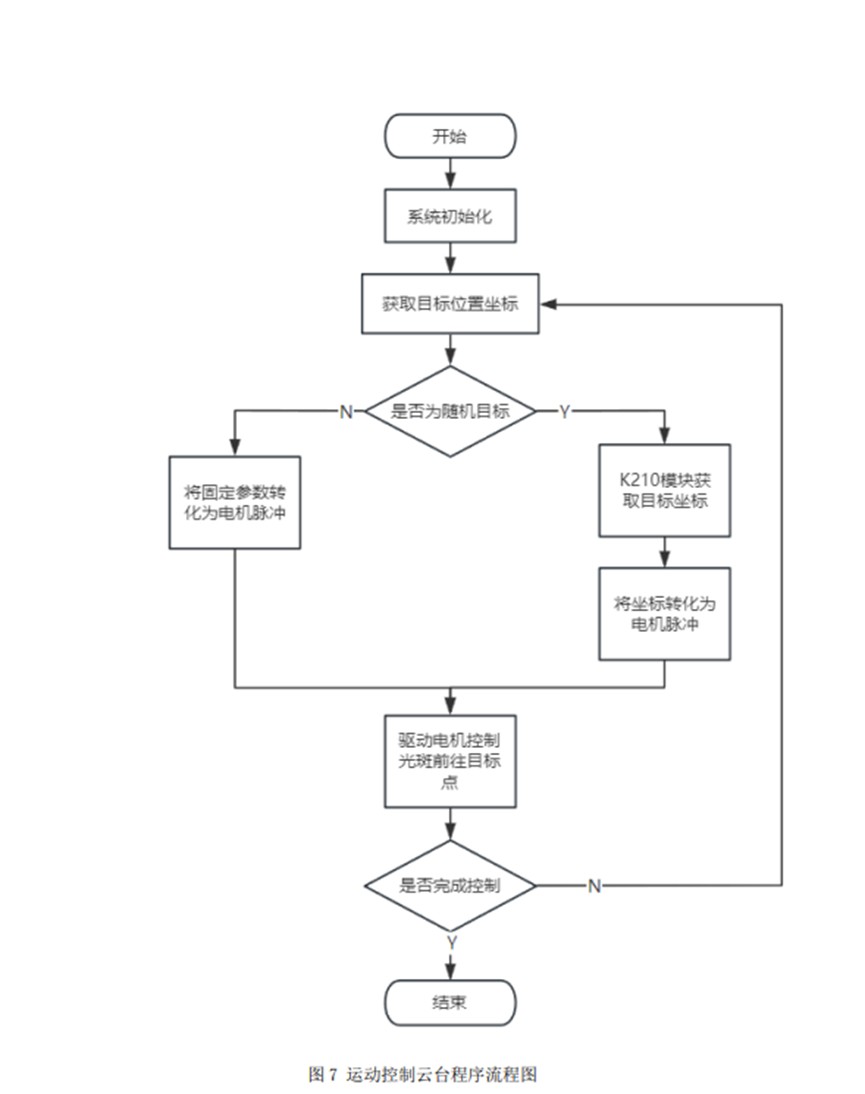
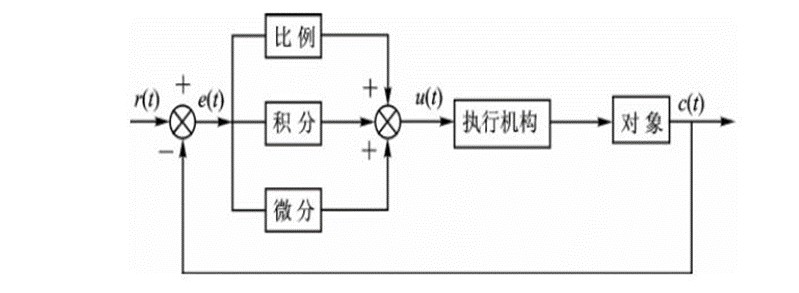
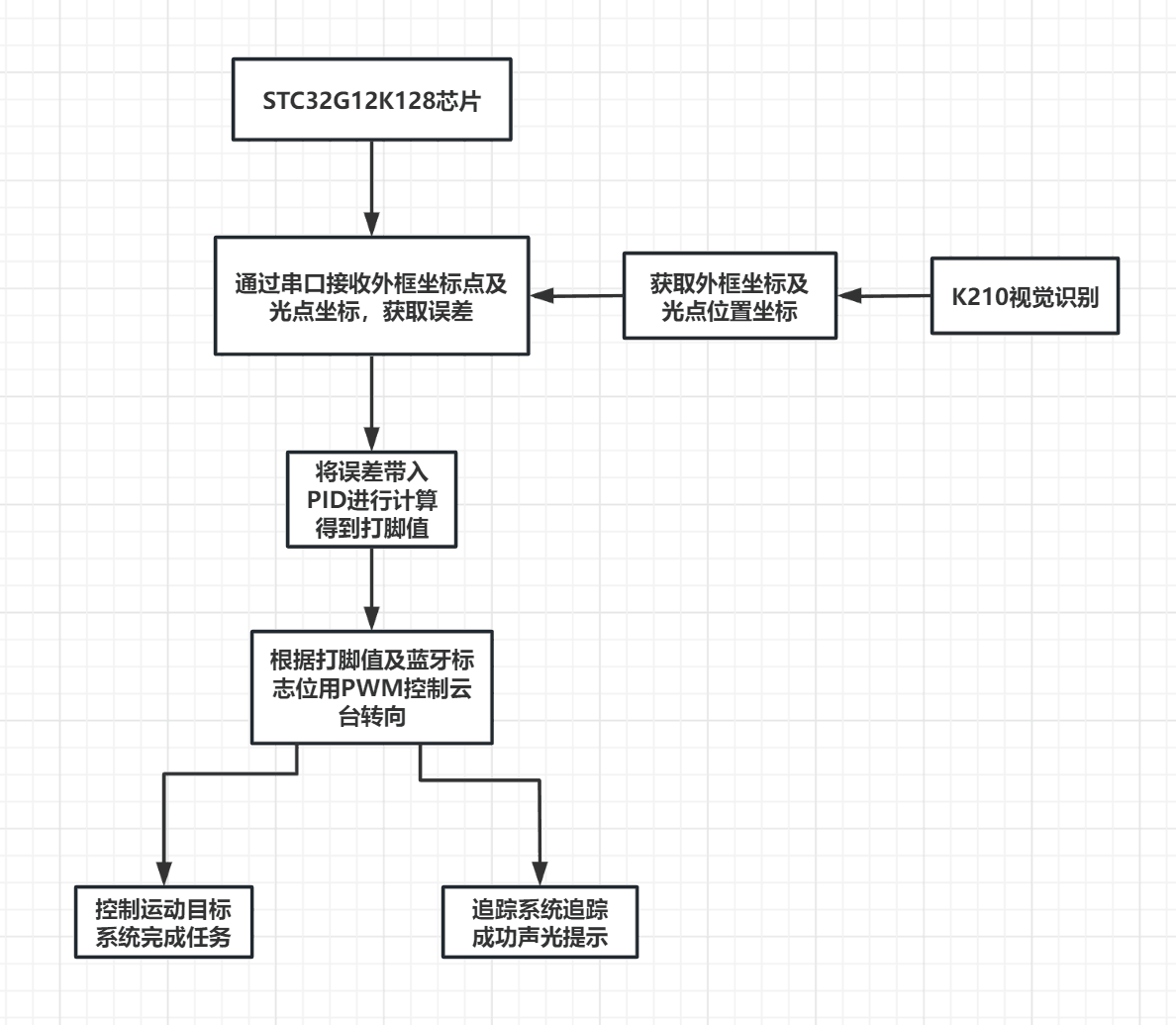
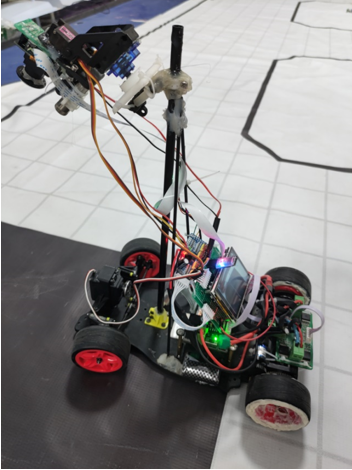
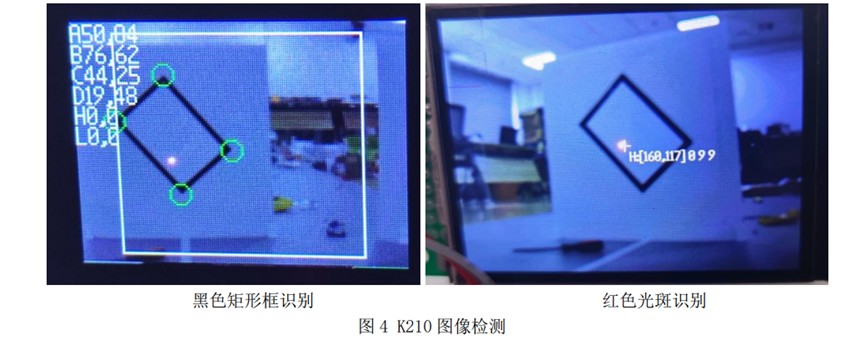
控制思路流程: 整体的控制思路上通过K210识别外边框提取顶点坐标点及红绿光点坐标,通过串口发送到STC32G12K128单片机进行误差计算,通过PID计算后PWM控制舵机打脚。使用按键实现人机交互控制题目选择,控制云台完成任务。STC32G12K128单片机做主控,K210视觉模块辅助完成视觉任务,PID算法为控制核心搭建运动目标控制系统和自动追踪系统。
本系统有很好的稳定性,符合题目的各种要求。 云台一:CPU MODE: 251 SOURCE MODE INTR FRAME: 2 BYTES SAVED ON INTERRUPT MEMORY MODEL: XSMALL WITH FLOATING POINT ARITHMETIC
INPUT MODULES INCLUDED: .\Out_File\board.obj (board) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\common.obj (common) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_adc.obj (zf_adc) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_delay.obj (zf_delay) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_eeprom.obj (zf_eeprom) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_exti.obj (zf_exti) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_gpio.obj (zf_gpio) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_nvic.obj (zf_nvic) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_pwm.obj (zf_pwm) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_spi.obj (zf_spi) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_tim.obj (zf_tim) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_uart.obj (zf_uart) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_fifo.obj (zf_fifo) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_18TFT.obj (SEEKFREE_18TFT) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_BLUETOOTH_CH9141.obj (SEEKFREE_BLUETOOTH_CH9141) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_DL1A.obj (SEEKFREE_DL1A) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_DL1B.obj (SEEKFREE_DL1B) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_FONT.obj (SEEKFREE_FONT) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_ICM20602.obj (SEEKFREE_ICM20602) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IMU660RA.obj (SEEKFREE_IMU660RA) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IMU963RA.obj (SEEKFREE_IMU963RA) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IPS114_SPI.obj (SEEKFREE_IPS114_SPI) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_MPU6050.obj (SEEKFREE_MPU6050) COMMENT TYPE 0: C251 V5.60.0 �L251 LINKER/LOCATER V4.66.93.0 10/13/2023 18:10:35 PAGE 2
.\Out_File\SEEKFREE_OLED.obj (SEEKFREE_OLED) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_PRINTF.obj (SEEKFREE_PRINTF) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_VIRSCO.obj (SEEKFREE_VIRSCO) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_WIRELESS.obj (SEEKFREE_WIRELESS) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_WIRELESS_CH573.obj (SEEKFREE_WIRELESS_CH573) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\isr.obj (isr) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\main.obj (main) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\control.obj (control) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\uart..obj (uart) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\all_int.obj (all_int) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\yuntai.obj (yuntai) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\anjian.obj (anjian) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\show.obj (show) COMMENT TYPE 0: C251 V5.60.0 ..\..\Libraries\seekfree_peripheral\SEEKFREE_CONFIG.LIB (SEEKFREE_CONFIG) COMMENT TYPE 0: C251 V5.60.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPADD) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPCMP) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPNEG) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FCAST) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?CASTF) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (PRINTF) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPGETOPN) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?PRNFMT) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPCONVERT) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FTNPWR) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C_START) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?INITEDATA) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?SIDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?LMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?LIMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?ULDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?SLDIV) �L251 LINKER/LOCATER V4.66.93.0 10/13/2023 18:10:35 PAGE 3
COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (memcpy) COMMENT TYPE 0: C251 V5.58.7 D:\KEIL5\C251\LIB\C2SXS.LIB (memset) COMMENT TYPE 0: C251 V5.58.7 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?INITEDATA_END) COMMENT TYPE 0: A251 V4.69.6.0
ACTIVE MEMORY CLASSES OF MODULE: .\Out_File\SEEKFREE (board)
云台二: CPU MODE: 251 SOURCE MODE INTR FRAME: 2 BYTES SAVED ON INTERRUPT MEMORY MODEL: XSMALL WITH FLOATING POINT ARITHMETIC
INPUT MODULES INCLUDED: .\Out_File\board.obj (board) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\common.obj (common) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_adc.obj (zf_adc) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_delay.obj (zf_delay) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_eeprom.obj (zf_eeprom) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_exti.obj (zf_exti) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_gpio.obj (zf_gpio) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_nvic.obj (zf_nvic) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_pwm.obj (zf_pwm) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_spi.obj (zf_spi) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_tim.obj (zf_tim) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_uart.obj (zf_uart) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\zf_fifo.obj (zf_fifo) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_18TFT.obj (SEEKFREE_18TFT) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_BLUETOOTH_CH9141.obj (SEEKFREE_BLUETOOTH_CH9141) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_DL1A.obj (SEEKFREE_DL1A) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_DL1B.obj (SEEKFREE_DL1B) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_FONT.obj (SEEKFREE_FONT) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_ICM20602.obj (SEEKFREE_ICM20602) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IMU660RA.obj (SEEKFREE_IMU660RA) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IMU963RA.obj (SEEKFREE_IMU963RA) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_IPS114_SPI.obj (SEEKFREE_IPS114_SPI) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_MPU6050.obj (SEEKFREE_MPU6050) COMMENT TYPE 0: C251 V5.60.0 �L251 LINKER/LOCATER V4.66.93.0 10/13/2023 18:11:45 PAGE 2
.\Out_File\SEEKFREE_OLED.obj (SEEKFREE_OLED) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_PRINTF.obj (SEEKFREE_PRINTF) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_VIRSCO.obj (SEEKFREE_VIRSCO) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_WIRELESS.obj (SEEKFREE_WIRELESS) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\SEEKFREE_WIRELESS_CH573.obj (SEEKFREE_WIRELESS_CH573) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\isr.obj (isr) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\main.obj (main) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\control.obj (control) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\uart..obj (uart) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\all_int.obj (all_int) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\yuntai.obj (yuntai) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\anjian.obj (anjian) COMMENT TYPE 0: C251 V5.60.0 .\Out_File\show.obj (show) COMMENT TYPE 0: C251 V5.60.0 ..\..\Libraries\seekfree_peripheral\SEEKFREE_CONFIG.LIB (SEEKFREE_CONFIG) COMMENT TYPE 0: C251 V5.60.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPADD) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPCMP) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FCAST) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?CASTF) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (PRINTF) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPGETOPN) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?PRNFMT) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FPCONVERT) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SFPXS.LIB (?C?FTNPWR) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C_START) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?INITEDATA) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?SIDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?LMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?LIMUL) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?ULDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?SLDIV) COMMENT TYPE 0: A251 V4.69.6.0 D:\KEIL5\C251\LIB\C2SXS.LIB (ABS) �L251 LINKER/LOCATER V4.66.93.0 10/13/2023 18:11:45 PAGE 3
COMMENT TYPE 0: C251 V5.58.7 D:\KEIL5\C251\LIB\C2SXS.LIB (memcpy) COMMENT TYPE 0: C251 V5.58.7 D:\KEIL5\C251\LIB\C2SXS.LIB (memset) COMMENT TYPE 0: C251 V5.58.7 D:\KEIL5\C251\LIB\C2SXS.LIB (?C?INITEDATA_END) COMMENT TYPE 0: A251 V4.69.6.0
ACTIVE MEMORY CLASSES OF MODULE: .\Out_File\SEEKFREE (board)
| 

 发表于 2023-10-13 10:25:47
发表于 2023-10-13 10:25:47
`PFT.png")

![YQ75ZNU1]YK2TU~P4ER{}BJ.png](data/attachment/forum/202310/13/150431zhehuvbil44jk4hu.png "YQ75ZNU1]YK2TU~P4ER{}BJ.png")

![5]3E}%RBLBV{S}45DEDBJ.png](data/attachment/forum/202310/13/150442qh6ni5cql7l3nx55.png "5]3E}%RBLBV{S}45DEDBJ.png")

 发表于 2023-10-13 10:37:27
发表于 2023-10-13 10:37:27






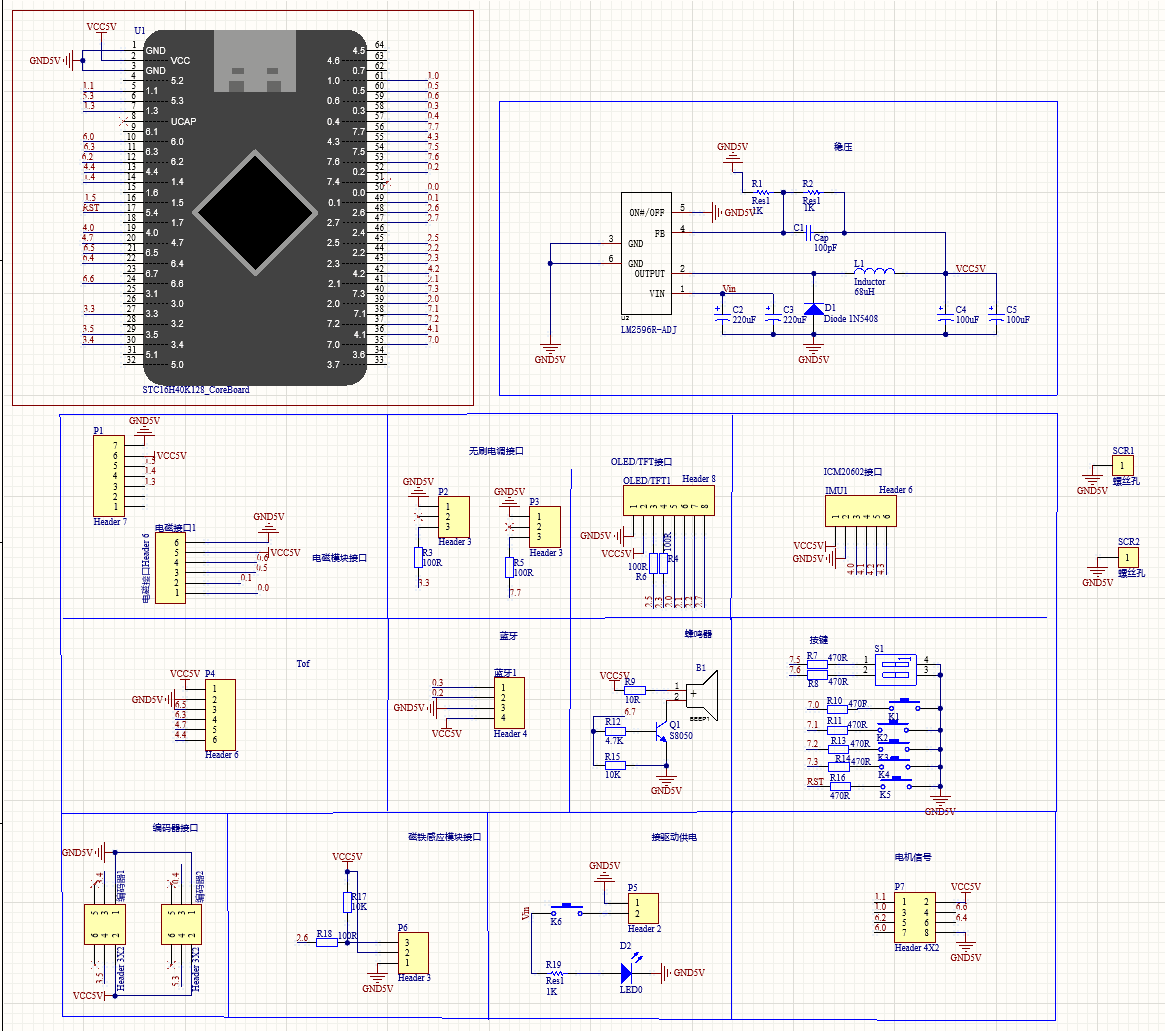
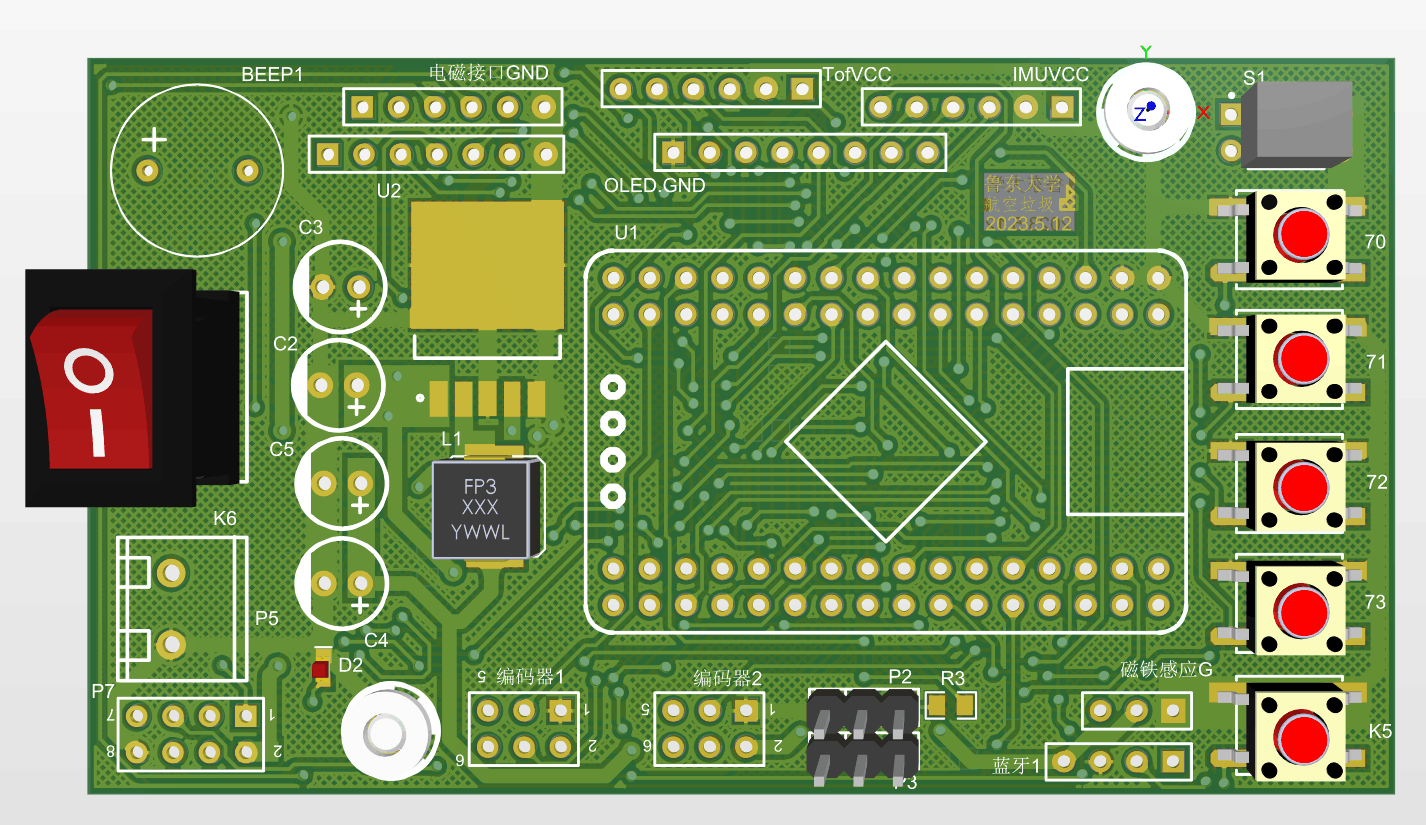
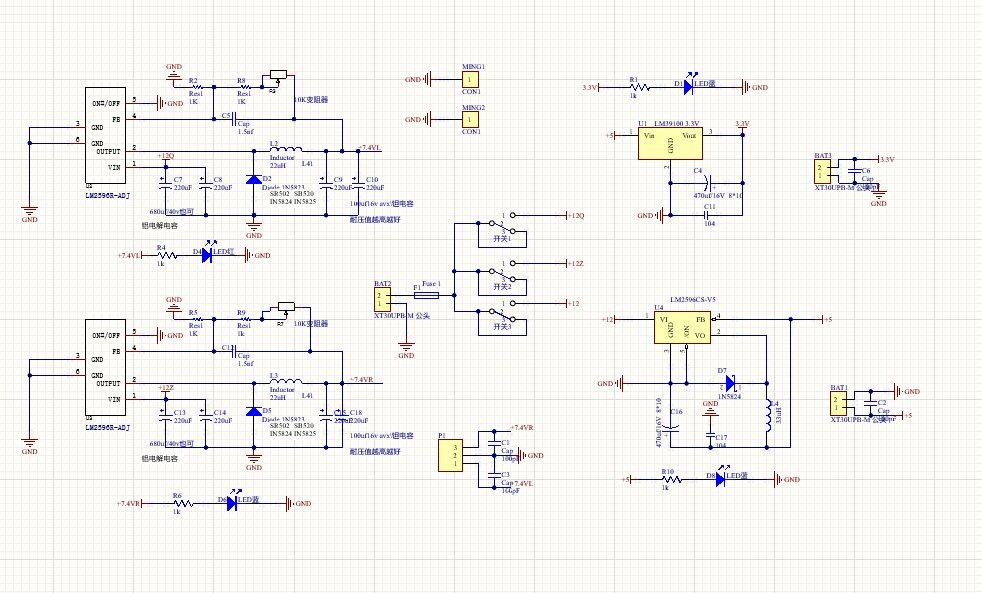
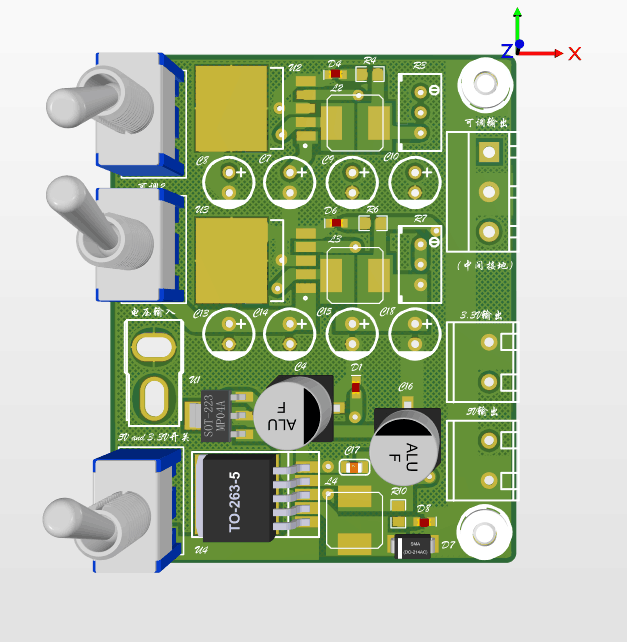




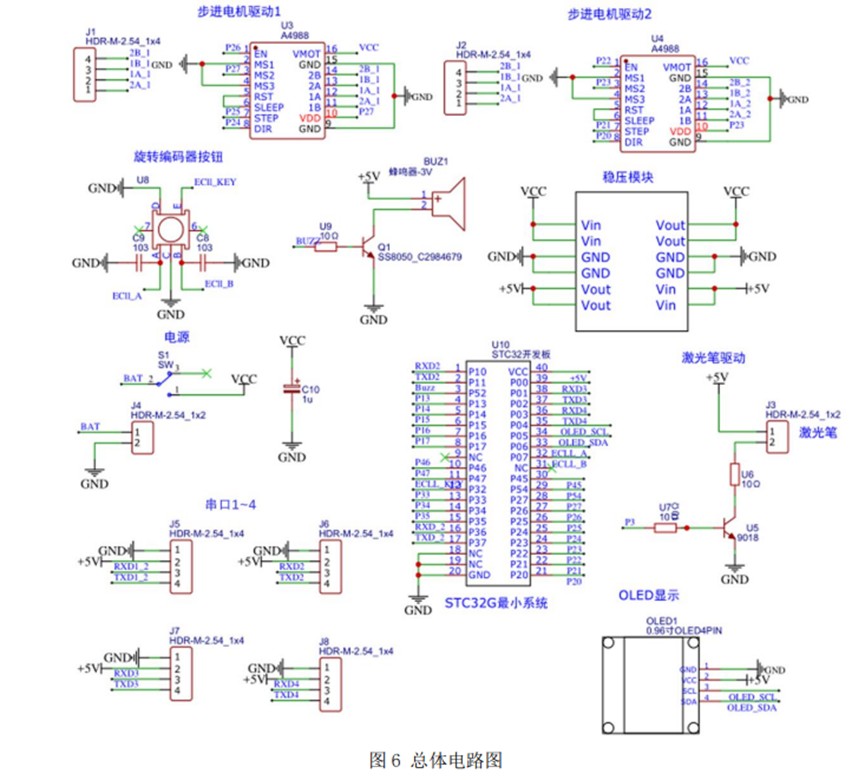
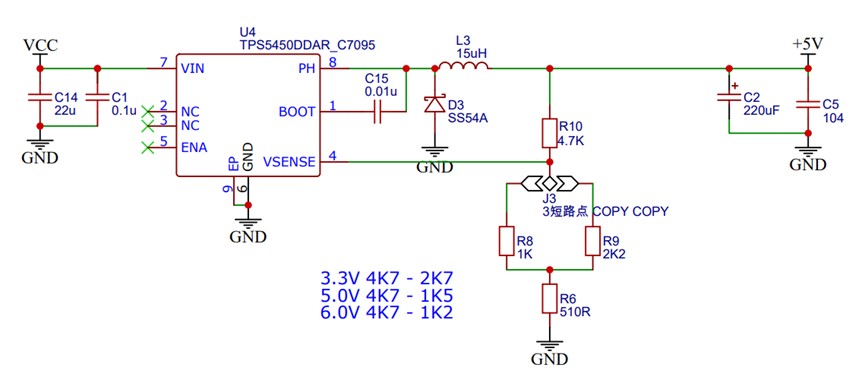
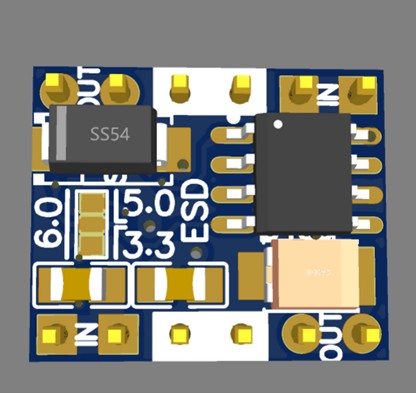
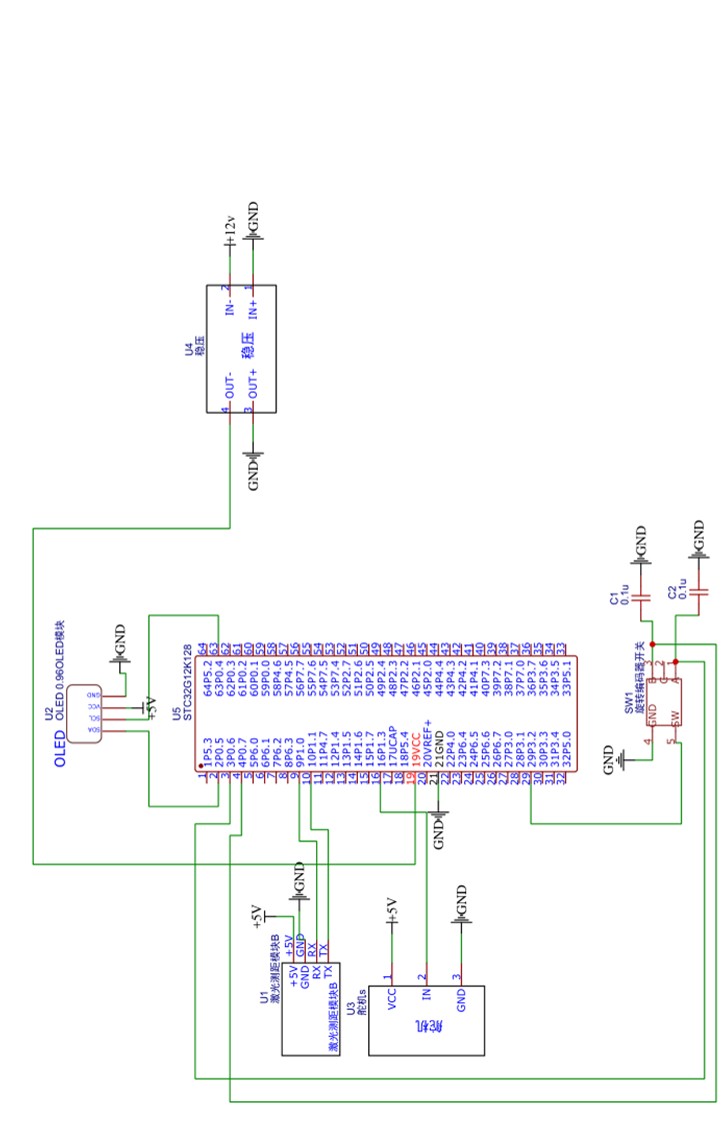
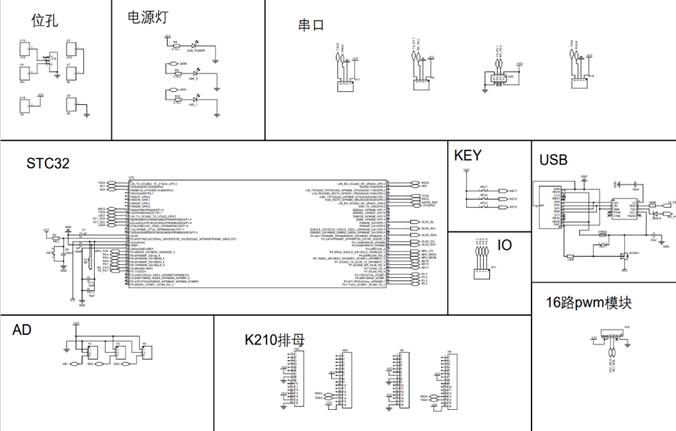
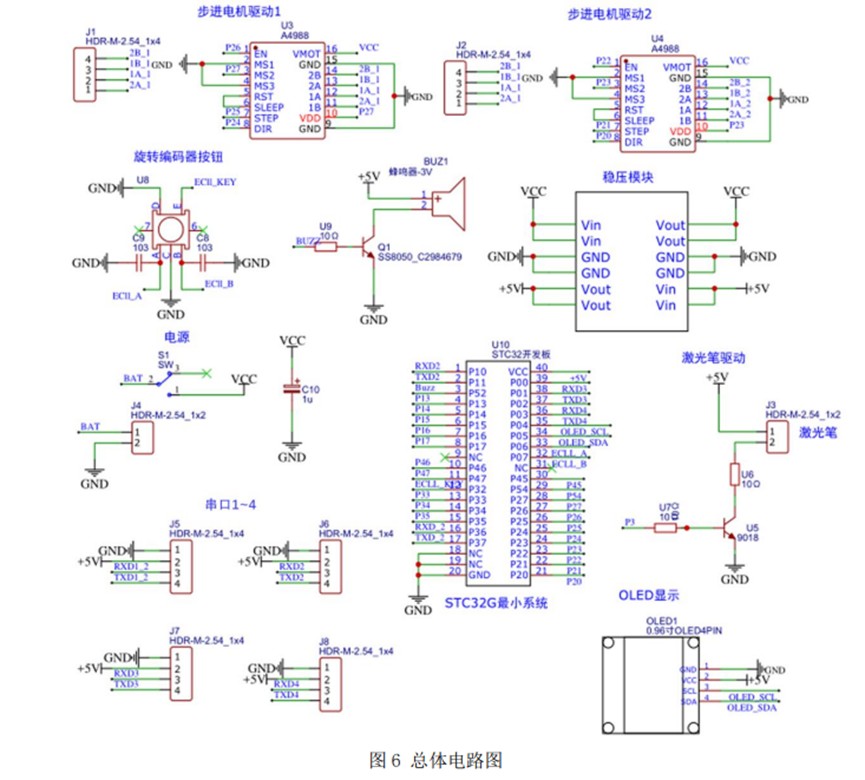
 。主板方面是抄的逐飞的板子,就不再过多展示,下面着重说明飞机STC32G12K128主控的设计和使用。
。主板方面是抄的逐飞的板子,就不再过多展示,下面着重说明飞机STC32G12K128主控的设计和使用。





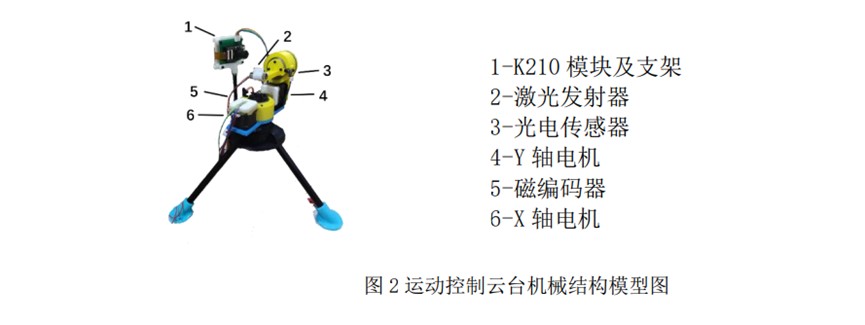

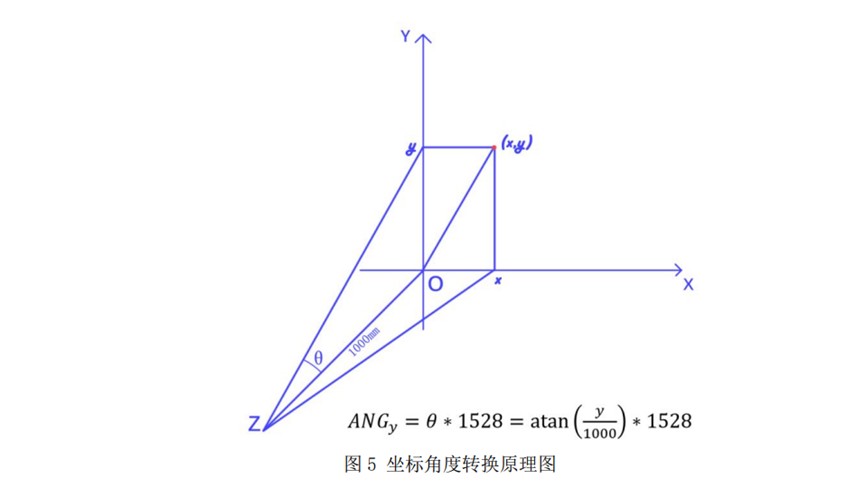
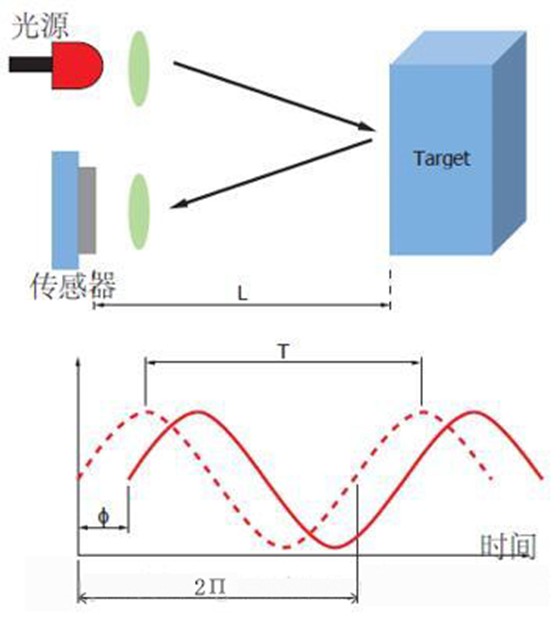
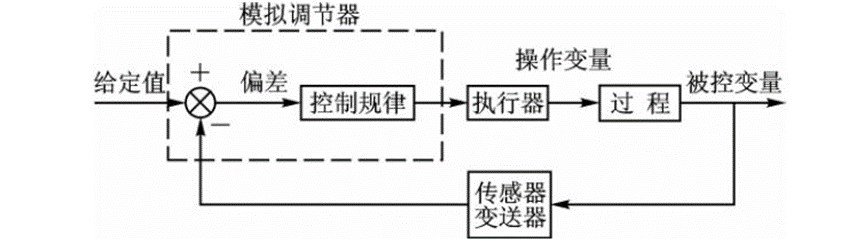
 运动目标控制原理
运动目标控制原理